与程序员相关的CPU缓存知识
 好久没有写一些微观方面的文章了,今天写一篇关于CPU Cache相关的文章,这篇文章比较长,主要分成这么几个部分:基础知识、缓存的命中、缓存的一致性、相关的代码示例和延伸阅读。其中会讲述一些多核 CPU 的系统架构以及其原理,包括对程序性能上的影响,以及在进行并发编程的时候需要注意到的一些问题。这篇文章我会尽量地写简单和通俗易懂一些,主要是讲清楚相关的原理和问题,而对于一些细节和延伸阅读我会在文章最后会给出相关的资源。
好久没有写一些微观方面的文章了,今天写一篇关于CPU Cache相关的文章,这篇文章比较长,主要分成这么几个部分:基础知识、缓存的命中、缓存的一致性、相关的代码示例和延伸阅读。其中会讲述一些多核 CPU 的系统架构以及其原理,包括对程序性能上的影响,以及在进行并发编程的时候需要注意到的一些问题。这篇文章我会尽量地写简单和通俗易懂一些,主要是讲清楚相关的原理和问题,而对于一些细节和延伸阅读我会在文章最后会给出相关的资源。
因为无论你写什么样的代码都会交给CPU来执行,所以,如果你想写出性能比较高的代码,这篇文章中提到的技术还是值得认真学习的。另外,千万别觉得这些东西没用,这些东西非常有用,十多年前就是这些知识在性能调优上帮了我的很多大忙,从而跟很多人拉开了差距……
目录
基础知识
首先,我们都知道现在的CPU多核技术,都会有几级缓存,老的CPU会有两级内存(L1和L2),新的CPU会有三级内存(L1,L2,L3 ),如下图所示:
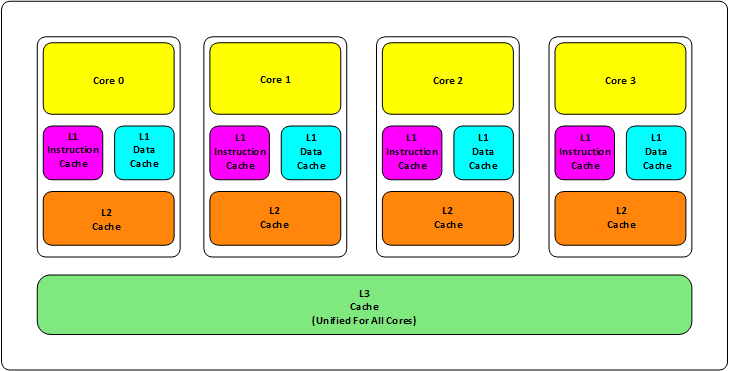
其中:
- L1缓存分成两种,一种是指令缓存,一种是数据缓存。L2缓存和L3缓存不分指令和数据。
- L1和L2缓存在每一个CPU核中,L3则是所有CPU核心共享的内存。
- L1、L2、L3的越离CPU近就越小,速度也越快,越离CPU远,速度也越慢。
再往后面就是内存,内存的后面就是硬盘。我们来看一些他们的速度:
- L1 的存取速度: 4 个CPU时钟周期
- L2 的存取速度: 11 个CPU时钟周期
- L3 的存取速度: 39 个CPU时钟周期
- RAM内存的存取速度 :107 个CPU时钟周期
我们可以看到,L1的速度是RAM的27倍,但是L1/L2的大小基本上也就是KB级别的,L3会是MB级别的。例如: Intel Core i7-8700K ,是一个6核的CPU,每核上的L1是64KB(数据和指令各32KB),L2 是 256K,L3有2MB(我的苹果电脑是 Intel Core i9-8950HK ,和Core i7-8700K的Cache大小一样)。
我们的数据就从内存向上,先到L3,再到L2,再到L1,最后到寄存器进行CPU计算。为什么会设计成三层?这里有下面几个方面的考虑:
- 一个方面是物理速度,如果要更大的容量就需要更多的晶体管,除了芯片的体积会变大,更重要的是大量的晶体管会导致速度下降,因为访问速度和要访问的晶体管所在的位置成反比,也就是当信号路径变长时,通信速度会变慢。这部分是物理问题。
- 另外一个问题是,多核技术中,数据的状态需要在多个CPU中进行同步,并且,我们可以看到,cache和RAM的速度差距太大,所以,多级不同尺寸的缓存有利于提高整体的性能。
这个世界永远是平衡的,一面变得有多光鲜,另一面也会变得有多黑暗。建立这么多级的缓存,一定就会引入其它的问题,这里有两个比较重要的问题,
- 一个是比较简单的缓存的命中率的问题。
- 另一个是比较复杂的缓存更新的一致性问题。
尤其是第二个问题,在多核技术下,这就很像分布式的系统了,要对多个地方进行更新。
缓存的命中
在说明这两个问题之前。我们需要要解一个术语 Cache Line。缓存基本上来说就是把后面的数据加载到离自己近的地方,对于CPU来说,它是不会一个字节一个字节的加载的,因为这非常没有效率,一般来说都是要一块一块的加载的,对于这样的一块一块的数据单位,术语叫“Cache Line”,一般来说,一个主流的CPU的Cache Line 是 64 Bytes(也有的CPU用32Bytes和128Bytes),64Bytes也就是16个32位的整型,这就是CPU从内存中捞数据上来的最小数据单位。
比如:Cache Line是最小单位(64Bytes),所以先把Cache分布多个Cache Line,比如:L1有32KB,那么,32KB/64B = 512 个 Cache Line。
一方面,缓存需要把内存里的数据放到放进来,英文叫 CPU Associativity。Cache的数据放置的策略决定了内存中的数据块会拷贝到CPU Cache中的哪个位置上,因为Cache的大小远远小于内存,所以,需要有一种地址关联的算法,能够让内存中的数据可以被映射到Cache中来。这个有点像内存地址从逻辑地址向物理地址映射的方法,但不完全一样。
基本上来说,我们会有如下的一些方法。
- 一种方法是,任何一个内存地址的数据可以被缓存在任何一个Cache Line里,这种方法是最灵活的,但是,如果我们要知道一个内存是否存在于Cache中,我们就需要进行O(n)复杂度的Cache遍历,这是很没有效率的。
-
另一种方法,为了降低缓存搜索算法,我们需要使用像Hash Table这样的数据结构,最简单的hash table就是做“求模运算”,比如:我们的L1 Cache有512个Cache Line,那么,公式:
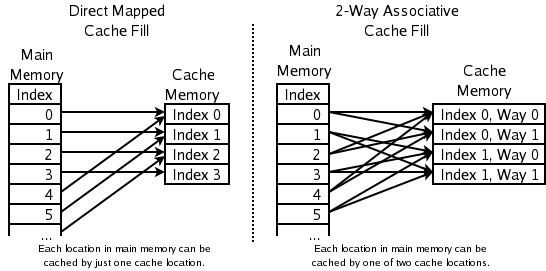
(内存地址 mod 512)* 64就可以直接找到所在的Cache地址的偏移了。但是,这样的方式需要我们的程序对内存地址的访问要非常地平均,不然冲突就会非常严重。这成了一种非常理想的情况了。 - 为了避免上述的两种方案的问题,于是就要容忍一定的hash冲突,也就出现了 N-Way 关联。也就是把连续的N个Cache Line绑成一组,然后,先把找到相关的组,然后再在这个组内找到相关的Cache Line。这叫 Set Associativity。如下图所示。
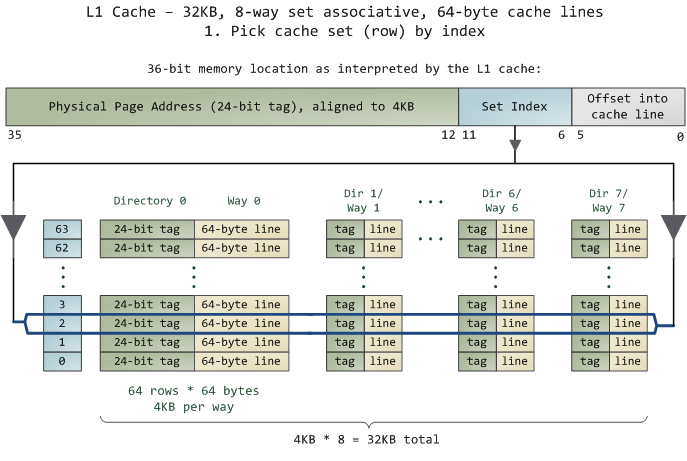
对于 N-Way 组关联,可能有点不好理解,这里个例子,并多说一些细节(不然后面的代码你会不能理解),Intel 大多数处理器的L1 Cache都是32KB,8-Way 组相联,Cache Line 是64 Bytes。这意味着,
- 32KB的可以分成,32KB / 64 = 512 条 Cache Line。
- 因为有8 Way,于是会每一Way 有 512 / 8 = 64 条 Cache Line。
- 于是每一路就有 64 x 64 = 4096 Byts 的内存。
为了方便索引内存地址,
- Tag :每条 Cache Line 前都会有一个独立分配的 24 bits来存的 tag,其就是内存地址的前24bits
- Index :内存地址后续的6个bits则是在这一Way的是Cache Line 索引,2^6 = 64 刚好可以索引64条Cache Line
- Offset :再往后的6bits用于表示在Cache Line 里的偏移量
如下图所示:(图片来自《 Cache: a place for concealment and safekeeping 》)
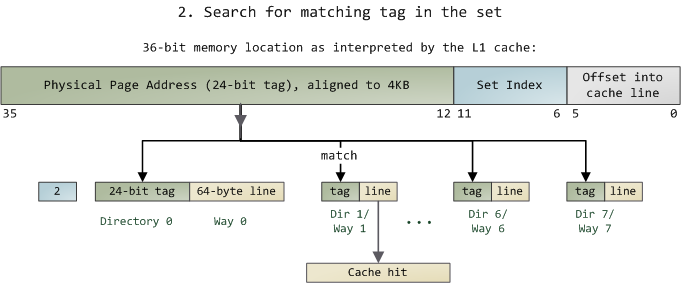
当拿到一个内存地址的时候,先拿出中间的 6bits 来,找到是哪组。
然后,在这一个8组的cache line中,再进行O(n) n=8 的遍历,主是要匹配前24bits的tag。如果匹配中了,就算命中,如果没有匹配到,那就是cache miss,如果是读操作,就需要进向后面的缓存进行访问了。L2/L3同样是这样的算法。而淘汰算法有两种,一种是随机一种是LRU。现在一般都是以LRU的算法(通过增加一个访问计数器来实现)
这也意味着:
- L1 Cache 可映射 36bits 的内存地址,一共 2^36 = 64GB的内存
- 当CPU要访问一个内存的时候,通过这个内存中间的6bits 定位是哪个set,通过前 24bits 定位相应的Cache Line。
- 就像一个hash Table的数据结构一样,先是O(1)的索引,然后进入冲突搜索。
- 因为中间的 6bits 决定了一个同一个set,所以,对于一段连续的内存来说,每隔4096的内存会被放在同一个组内,导致缓存冲突。
此外,当有数据没有命中缓存的时候,CPU就会以最小为Cache Line的单元向内存更新数据。当然,CPU并不一定只是更新64Bytes,因为访问主存实在是太慢了,所以,一般都会多更新一些。好的CPU会有一些预测的技术,如果找到一种pattern的话,就会预先加载更多的内存,包括指令也可以预加载。这叫 Prefetching 技术 (参看,Wikipedia 的 Cache Prefetching 和 纽约州立大学的 Memory Prefetching )。比如,你在for-loop访问一个连续的数组,你的步长是一个固定的数,内存就可以做到prefetching。(注:指令也是以预加载的方式执行,参看本站的《 代码执行的效率 》中的第三个示例)
了解这些细节,会有利于我们知道在什么情况下有可以导致缓存的失效。
缓存的一致性
对于主流的CPU来说,缓存的写操作基本上是两种策略(参看本站《 缓存更新的套路 》),
- 一种是Write Back,写操作只要在cache上,然后再flush到内存上。
- 一种是Write Through,写操作同时写到cache和内存上。
为了提高写的性能,一般来说,主流的CPU(如:Intel Core i7/i9)采用的是Write Back的策略,因为直接写内存实在是太慢了。
好了,现在问题来了,如果有一个数据 x 在 CPU 第0核的缓存上被更新了,那么其它CPU核上对于这个数据 x 的值也要被更新,这就是缓存一致性的问题。(当然,对于我们上层的程序我们不用关心CPU多个核的缓存是怎么同步的,这对上层的代码来说都是透明的)
一般来说,在CPU硬件上,会有两种方法来解决这个问题。
- Directory 协议 。这种方法的典型实现是要设计一个集中式控制器,它是主存储器控制器的一部分。其中有一个目录存储在主存储器中,其中包含有关各种本地缓存内容的全局状态信息。当单个CPU Cache 发出读写请求时,这个集中式控制器会检查并发出必要的命令,以在主存和CPU Cache之间或在CPU Cache自身之间进行数据同步和传输。
- Snoopy 协议 。这种协议更像是一种数据通知的总线型的技术。CPU Cache通过这个协议可以识别其它Cache上的数据状态。如果有数据共享的话,可以通过广播机制将共享数据的状态通知给其它CPU Cache。这个协议要求每个CPU Cache 都可以 “ 窥探 ” 数据事件的通知并做出相应的反应。如下图所示,有一个Snoopy Bus的总线。

因为Directory协议是一个中心式的,会有性能瓶颈,而且会增加整体设计的复杂度。而Snoopy协议更像是微服务+消息通讯,所以,现在基本都是使用Snoopy的总线的设计。
这里,我想多写一些细节,因为这种微观的东西,让人不自然地就会跟分布式系统关联起来,在分布式系统中我们一般用Paxos/Raft这样的分布式一致性的算法。而在CPU的微观世界里,则不必使用这样的算法,原因是因为CPU的多个核的硬件不必考虑网络会断会延迟的问题。所以,CPU的多核心缓存间的同步的核心就是要管理好数据的状态就好了。
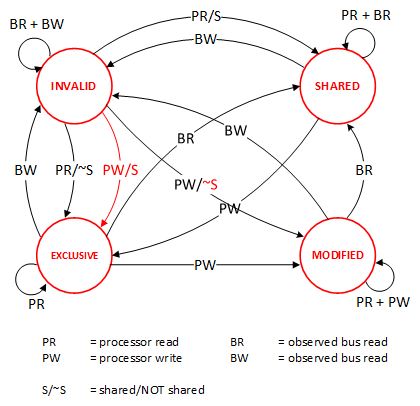
这里介绍几个状态协议,先从最简单的开始,MESI协议,这个协议跟那个著名的足球运动员梅西没什么关系,其主要表示缓存数据有四个状态:Modified(已修改), Exclusive(独占的),Shared(共享的),Invalid(无效的)。
这些状态的状态机如下所示(有点复杂,你可以先不看,这个图就是想告诉你状态控制有多复杂):
下面是个示例(如果你想看一下动画演示的话,这里有一个网页( MESI Interactive Animations ),你可以进行交互操作,这个动画演示中使用的Write Through算法):
| 当前操作 | CPU0 | CPU1 | Memory | 说明 |
|---|---|---|---|---|
| 1) CPU0 read(x) | x=1 (E) | x=1 |
只有一个CPU有 x 变量,
所以,状态是 Exclusive |
|
| 2) CPU1 read(x) | x=1 (S) | x=1(S) | x=1 |
有两个CPU都读取 x 变量,
所以状态变成 Shared |
| 3) CPU0 write(x,9) | x= 9 (M) | x=1(I) | x=1 |
变量改变,在CPU0中状态
变成 Modified,在CPU1中 状态变成 Invalid |
| 4) 变量 x 写回内存 | x=9 (M) | X=1(I) | x=9 | 目前的状态不变 |
| 5) CPU1 read(x) | x=9 (S) | x=9(S) | x=9 |
变量同步到所有的Cache中,
状态回到Shared |
MESI 这种协议在数据更新后,会标记其它共享的CPU缓存的数据拷贝为Invalid状态,然后当其它CPU再次read的时候,就会出现 cache miss 的问题,此时再从内存中更新数据。从内存中更新数据意味着20倍速度的降低。我们能不能直接从我隔壁的CPU缓存中更新?是的,这就可以增加很多速度了,但是状态控制也就变麻烦了。还需要多来一个状态:Owner(宿主),用于标记,我是更新数据的源。于是,出现了 MOESI 协议
MOESI协议的状态机和演示示例我就不贴了(有兴趣可以上 Berkeley上看看相关的课件 ), 我们只需要理解MOESI协议允许 CPU Cache 间同步数据,于是也降低了对内存的操作 ,性能是非常大的提升,但是控制逻辑也非常复杂。
顺便说一下,与 MOESI 协议类似的一个协议是 MESIF ,其中的 F 是 Forward,同样是把更新过的数据转发给别的 CPU Cache 但是,MOESI 中的 Owner 状态 和MESIF 中的 Forward 状态有一个非常大的不一样—— Owner状态下的数据是dirty的,还没有写回内存,Forward状态下的数据是clean的,可以丢弃而不用另行通知 。
需要说明的是,AMD用MOESI,Intel用MESIF。所以,F 状态主要是针对 CPU L3 Cache 设计的(前面我们说过,L3是所有CPU核心共享的)。(相关的比较可以参看 StackOverlow上这个问题的答案 )
程序性能
了解了我们上面的这些东西后,我们来看一下对于程序的影响。
示例一
首先,假设我们有一个64M长的数组,设想一下下面的两个循环:
const int LEN = 64*1024*1024; int *arr = new int[LEN]; for (int i = 0; i < LEN; i += 2) arr[i] *= i; for (int i = 0; i < LEN; i += 8) arr[i] *= i;
按我们的想法来看,第二个循环要比第一个循环少4倍的计算量,其应该也是要快4倍的。但实际跑下来并不是, 在我的机器上,第一个循环需要127毫秒,第二个循环则需要121毫秒,相差无几 。这里最主要的原因就是 Cache Line,因为CPU会以一个Cache Line 64Bytes最小时单位加载,也就是16个32bits的整型,所以,无论你步长是2还是8,都差不多。而后面的乘法其实是不耗CPU时间的。
示例二
我们再来看一个与缓存命中率有关的代码,我们以一定的步长
increment
来访问一个连续的数组。
for (int i = 0; i < 10000000; i++) {
for (int j = 0; j < size; j += increment) {
memory[j] += j;
}
}
我们测试一下,在下表中, 表头是步长,也就是每次跳多少个整数,而纵向是这个数组可以跳几次(你可以理解为要几条Cache Line),于是表中的任何一项代表了这个数组有多少,而且步长是多少。比如:横轴是 512,纵轴是4,意思是,这个数组有
4*512 = 2048
个长度,访问时按512步长访问,也就是访问其中的这几项:
[0, 512, 1024, 1536]
这四项。
表中同的项是,是循环1000万次的时间,单位是“微秒”(除以1000后是毫秒)
| count | 1 | 16 | 512 | 1024 | ------------------------------------------ | 1 | 17539 | 16726 | 15143 | 14477 | | 2 | 15420 | 14648 | 13552 | 13343 | | 3 | 14716 | 14463 | 15086 | 17509 | | 4 | 18976 | 18829 | 18961 | 21645 | | 5 | 23693 | 23436 | 74349 | 29796 | | 6 | 23264 | 23707 | 27005 | 44103 | | 7 | 28574 | 28979 | 33169 | 58759 | | 8 | 33155 | 34405 | 39339 | 65182 | | 9 | 37088 | 37788 | 49863 |156745 | | 10 | 41543 | 42103 | 58533 |215278 | | 11 | 47638 | 50329 | 66620 |335603 | | 12 | 49759 | 51228 | 75087 |305075 | | 13 | 53938 | 53924 | 77790 |366879 | | 14 | 58422 | 59565 | 90501 |466368 | | 15 | 62161 | 64129 | 90814 |525780 | | 16 | 67061 | 66663 | 98734 |440558 | | 17 | 71132 | 69753 |171203 |506631 | | 18 | 74102 | 73130 |293947 |550920 |
我们可以看到,从
[9,1024]
以后,时间显著上升。包括
[17,512]
和
[18,512]
也显著上升。这是因为,我机器的 L1 Cache 是 32KB, 8 Way 的,前面说过,8 Way的有64组,每组8个Cache Line,当for-loop步长超过1024个整型,也就是正好 4096 Bytes时,也就是导致内存地址的变化是变化在高位的24bits上,而低位的12bits变化不大,尤其是中间6bits没有变化,导致全部命中同一组set,导致大量的cache 冲突,导致性能下降,时间上升。而 [16, 512]也是一样的,其中的几步开始导致L1 Cache开始冲突失效。
示例三
接下来,我们再来看个示例。下面是一个二维数组的两种遍历方式,一个逐行遍历,一个是逐列遍历,这两种方式在理论上来说,寻址和计算量都是一样的,执行时间应该也是一样的。
const int row = 1024;
const int col = 512
int matrix[row][col];
//逐行遍历
int sum_row=0;
for(int _r=0; _r<row; _r++) {
for(int _c=0; _c<col; _c++){
sum_row += matrix[_r][_c];
}
}
//逐列遍历
int sum_col=0;
for(int _c=0; _c<col; _c++) {
for(int _r=0; _r<row; _r++){
sum_col += matrix[_r][_c];
}
}
然而,并不是,在我的机器上,得到下面的结果。
- 逐行遍历:0.081ms
- 逐列遍历:1.069ms
执行时间有十几倍的差距。其中的原因,就是逐列遍历对于CPU Cache 的运作方式并不友好,所以,付出巨大的代价。
示例四
接下来,我们来看一下多核下的性能问题,参看如下的代码。两个线程在操作一个数组的两个不同的元素(无需加锁),线程循环1000万次,做加法操作。在下面的代码中,我高亮了一行,就是
p2
指针,要么是
p[1]
,或是
p[30]
,理论上来说,无论访问哪两个数组元素,都应该是一样的执行时间。
void fn (int* data) {
for(int i = 0; i < 10*1024*1024; ++i)
*data += rand();
}
int p[32];
int *p1 = &p[0];
int *p2 = &p[1]; // int *p2 = &p[30];
thread t1(fn, p1);
thread t2(fn, p2);
然而,并不是,在我的机器上执行下来的结果是:
-
对于
p[0]和p[1]:560ms -
对于
p[0]和p[30]:104ms
这是因为
p[0]
和
p[1]
在同一条 Cache Line 上,而
p[0]
和
p[30]
则不可能在同一条Cache Line 上 ,CPU的缓存最小的更新单位是Cache Line,所以,
这导致虽然两个线程在写不同的数据,但是因为这两个数据在同一条Cache Line上,就会导致缓存需要不断进在两个CPU的L1/L2中进行同步,从而导致了5倍的时间差异
。
示例五
接下来,我们再来看一下另外一段代码:我们想统计一下一个数组中的奇数个数,但是这个数组太大了,我们希望可以用多线程来完成这个统计。下面的代码中, 我们为每一个线程传入一个 id ,然后通过这个 id 来完成对应数组段的统计任务。这样可以加快整个处理速度 。
int total_size = 16 * 1024 * 1024; //数组长度
int* test_data = new test_data[total_size]; //数组
int nthread = 6; //线程数(因为我的机器是6核的)
int result[nthread]; //收集结果的数组
void thread_func (int id) {
result[id] = 0;
int chunk_size = total_size / nthread + 1;
int start = id * chunk_size;
int end = min(start + chunk_size, total_size);
for ( int i = start; i < end; ++i ) {
if (test_data[i] % 2 != 0 ) ++result[id];
}
}
然而,在执行过程中,
你会发现,6个线程居然跑不过1个线程
。因为根据上面的例子你知道
result[]
这个数组中的数据在一个Cache Line中,所以,所有的线程都会对这个 Cache Line 进行写操作,导致所有的线程都在不断地重新同步
result[]
所在的 Cache Line,所以,导致 6 个线程还跑不过一个线程的结果。这叫
False Sharing
。
优化也很简单,使用一个线程内的变量。
void thread_func (int id) {
result[id] = 0;
int chunk_size = total_size / nthread + 1;
int start = id * chunk_size;
int end = min(start + chunk_size, total_size);
int c = 0; //使用临时变量,没有cache line的同步了
for ( int i = start; i < end; ++i ) {
if (test_data[i] % 2 != 0 ) ++c;
}
result[id] = c;
}
我们把两个程序分别在 1 到 32 个线程上跑一下,得出的结果画一张图如下所示(横轴是线程数,纵轴是完成统的时间,单位是微秒):
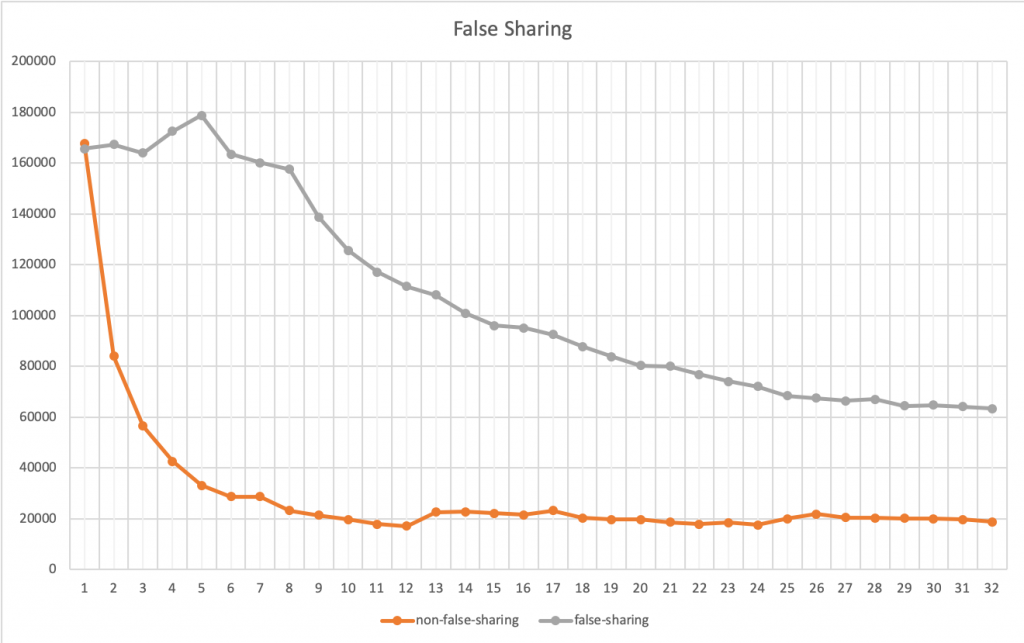
上图中,我们可以看到,灰色的曲线就是第一种方法,橙色的就是第二种(用局部变量的)方法。当只有一个线程的时候,两个方法相当,基本没有什么差别,但是在线程数增加的时候的时候,你会发现,第二种方法的性能提高的非常快。直到到达6个线程的时候,开始变得稳定(前面说过,我的CPU是6核的)。而第一种方法无论加多少线程也没有办法超过第二种方法。因为第一种方法不是CPU Cache 友好的。也就是说,第二种方法, 只要我的CPU核数足够多,就可以做到线性的性能扩展,让每一个CPU核都跑起来,而第一种则不能 。
篇幅问题,示例就写到这里,相关的代码参看 我的Github相关仓库 。
延伸阅读
- Wikipedia : CPU Cache
- 经典文章: Gallery of Processor Cache Effects (这篇文章中的测试已经有点过时了,但是这篇文章中所说的那些东西还是非常适用的)
- Effective C++作者 Scott Meyers 的演讲 CPU Caches and Why You Care ( Youtube , PPT )
- 美国私立大学Swarthmore的教材 Cache Architecture and Design
- 经典文章: What Every Programmer Should Know About Memory (这篇文章非常经典,但是开篇太晦涩了,居然告诉你晶体管内的构造,第三章和第六章是重点)
- Nonblocking Algorithms and Scalable Multicore Programming ( 英文版 , 中文版 )
- Github上的一个代码库 hardware-effects 里面有受CPU影响的程序的演示
- Optimizing for instruction caches ( Part 1 , Part 2 , Part 3 )
- 经典数据: Latency Numbers Every Programmer Should Know
- 关于Java的可以看一下这篇 Optimizing Memory Access With CPU Cache 或是 Writing cache-friendly code
总之,这个CPU Cache的调优技术不是什么新鲜的东西,只要Google就能找到有很多很多文章……
(全文完)
(转载本站文章请注明作者和出处 酷 壳 – CoolShell ,请勿用于任何商业用途)






 (
147
人打了分,平均分:
4.53
)
(
147
人打了分,平均分:
4.53
)
《 与程序员相关的CPU缓存知识 》的相关评论
我静悄悄的来啦,博主大大
2) Cache Line Race 这个测试例子不太好,里面有用到 rand这个函数,rand 耗时相对于cache冲突来说太大了。
Intel 下这个测试用例,如果用 rand ,确实是作者说的差5倍,但是把rand 去掉,改为
auto proc = [](volatile int* data) {
for(int i = 0; i < COUNT; ++i)
*data += 1; // `+= 1` won't be optimized.
};
耗时其实没那么大差别。
那段讲8 Way是怎么算的有点不清楚。
是不是 32KB的L1 Cache, 分成了64组 (set), 每个组里面有8个Way (代表 8个 Cache line).
这样是 64 组 * 8 (Way) * 64 (Cache line size) = 32 KB.
怎么不清楚了?你不都算出来了么?
就一点way就是way;不是代表8个cache line
我也是小白;我是这么理解的;
如有不对,也请多赐教。
<<<<
也就出现了 N-Way 关联。也就是把连续的N个Cache Line绑成一组
也就出现了 N-Way 关联。也就是把连续的M个Cache Line绑成一组,共N组。
从下方的计算过程来看,N-Way不是1 way有N个,而是把已有的存储划成N块?
因为有8 Way,于是会每一Way 有 512 / 8 = 64 条 Cache Line。
这一句错了,应该是有64路
没错的,它的物理本质就是cache lines
这文章太好啦!! 让正在学计算机架构课的我茅塞顿开!!先follow崇拜一下
耗子叔:
关于cacheline的描述我有一点疑问,我们把L1缓存的所有内存,分为 set 每个 set 内部有划分为 cacheline, 每个cacheline 的前24 bits是tag的值 还有一个 valid flag 标志位 ,而每个 cacheline 的值是 64 bytes 如果把这25 bits 的值算到cacheline 内部的话,那么cacheline的大小就要大于64bytes,如果不算到cacheline内部,那么L1 cache 的总的大小就要大于 32KB,是不是我哪里没有理解正确呢? 希望能给予点提示
同问,cache line是否包含tag、set index以及offset
不含,cache line就是指数据有64B。set index和offset在设计cache时就已经定好,使用的是VA的固定bits。
请问一下陈老师,你示例一测量时间用的是什么方法?我在Linux上面用getitimeofday来测量,发现 1.加不加 arr[i] *= i 影响时间一半
2.发现+2 和+8 确实时间有较大差别。
另外我都把进程绑定一个CPU核了。(我发现如果不绑定CPU核,时间也会多一倍左右)
看了git上面的代码 知道是如何测量的了。有个小小的疑惑,就是示例1中。用2和8递增确实应该时间相差不大,但是如果我用32,64递增,那么理论上时间应减少为原来的2分之1,4分之1才对哈。感觉还是相差不是很大。
另外示例一中,我测试下来发现,如果在提供的代码中仅仅去掉arr[i] *= i,则用的时间会小很多很多,因此是否不能说“而后面的乘法其实是不耗CPU时间的。”
陈老师,我认为您对way的理解有错误。8-way指的是每一个set里面有8个cache line;而不是每个set有64个cache line。其实n -way指的是每个内存位置在cache中有n个可以放的位置,直接映射以理解为1 -way组相联,全相联可以认为是m- way组相联(m是cache中 cache line的数量)
好文,学习了!
thank you
看网课被老师推荐过来的,收藏一下